UNIT.City — місце, де люди працюють... КРАЩЕ! Обирай свій простір просто зараз 👉
Наталя ХандусенкоHot News
19 August 2024, 17:49
2024-08-19
Італійці розробили першого у світі робота-гуманоїда з реактивним двигуном
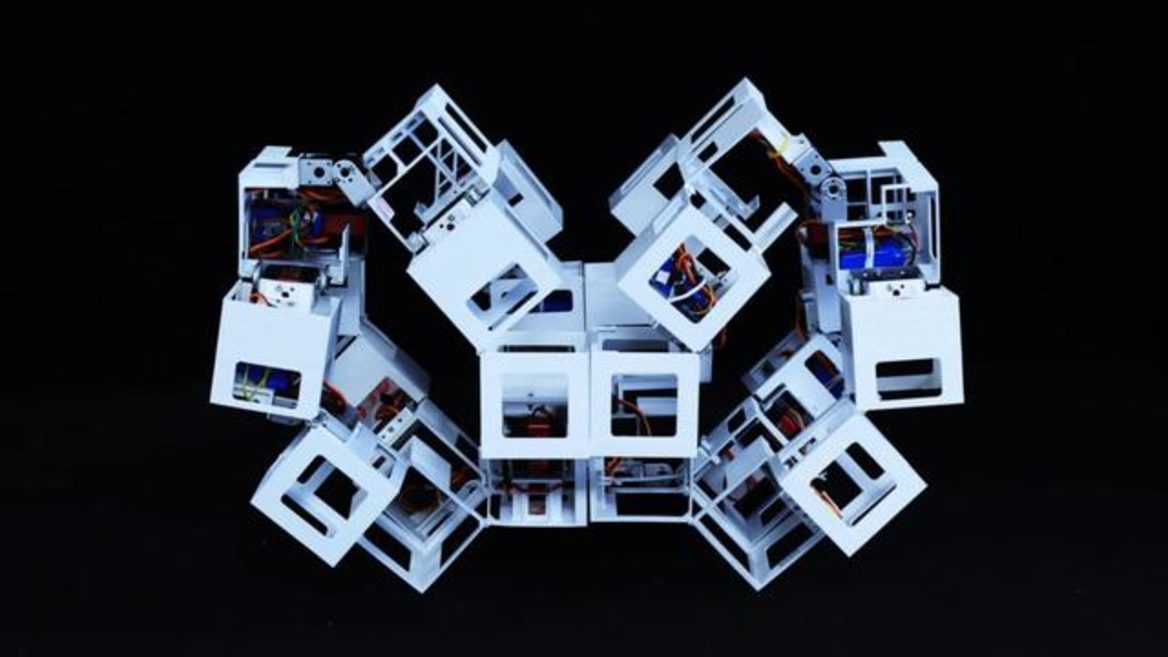
Робототехніки з Італійського технологічного інституту (IIT) створили першого у світі гуманоїдного робота — iRonCub. Він оснащений чотирма компактними реактивними двигунами, що дає йому можливість літати та виконувати складні місії.
Робототехніки з Італійського технологічного інституту (IIT) створили першого у світі гуманоїдного робота — iRonCub. Він оснащений чотирма компактними реактивними двигунами, що дає йому можливість літати та виконувати складні місії.
Тестувати перші прототипи робота почали ще у 2021 році. Тоді команда вчених зіткнулася з проблемами, оскільки намагалися запобігти загорянню чи навіть вибуху свого робота через вихлоп двигуна, пише Interesting Engineering.
Зараз є дві версії iRonCub: iCub v2.5 та v3.0. Вони мають 53 ступені гнучкості, по дев’ять у кожній руці та більшість у верхній частині тулуба. Він оснащений шкірою, датчиками сили/крутного моменту, камерами, мікрофонами, гіроскопами, акселерометрами та кодерами в кожному суглобі. Обидві версії оснащені чотирма реактивними двигунами — два встановлені на руках і два на реактивному ранці, прикріпленому до спини робота.
Поточні експерименти зосереджені на iRonCub версії 3.
iRonCub3 важить приблизно 70 кг. Турбіни створюють максимальну тягу понад 1000N, а температура вихлопних газів може перевищувати 600 градусів за Цельсієм.
Версія v3.0 має нову електроніку та системи управління і планування нового покоління, що працюють на вищих частотах.
Ключовим завданням у роботів такого типу є планування траєкторій як для польоту, так і для ходьби, включаючи переходи між ними.
Алгоритм планування траєкторії на основі імпульсу був розроблений на Python із використанням підходу прямої багаторазової зйомки для вирішення цієї проблеми. Цей планувальник перевірено моделюванням і незабаром буде випробувано на самому роботі.
Для керування польотом були розроблені алгоритми, які керують положенням і позицією робота, використовуючи оптимізацію обмеженого квадратичного програмування. За словами дослідників, цей фреймворк можна адаптувати до різної кількості реактивних турбін і забезпечити відповідність фізичним обмеженням.
Термодинаміка відіграє вирішальну роль, оскільки вихлопні гази турбін досягають приблизно 800 градусів за Цельсієм і майже зі швидкістю звуку. Аеродинаміка багато тільних систем потребує нейронних мереж із фізично обґрунтованими компонентами для оцінки в реальному часі.
Налаштування контролера повинні інтегрувати високошвидкісні та низькошвидкісні приводи, включаючи шарніри та турбіни. Перед проєктувальниками стоїть завдання генерувати траєкторії як для динаміки двигуна, так і для турбін.
Дослідники стверджують, що експериментальна перевірка є критично важливою й небезпечною, залишаючи мінімальний простір для імпровізації.